測量方位角計算
方位角(英語:azimuth,azimuth angle[1])又稱方位向[2]、地平經度,是從某觀察點的指北方向線起,依順時針方向到目標方向線之間的水平夾角[3](如右圖),屬球座標系中的角測量;其操作型定義為:從觀測者(原點)到感興趣點的向量投影正交到基準面,投影向量與基準面上參考向量(指北)之間的角度稱為方位角。

當用在天體坐標時,方位角是在天空中的恆星或天體在地平線上的方向。恆星是觀測者感興趣的點,參考平面是環繞著觀測者所在地區(例如,半徑約為5公里的海平面)的地球表面,參考向量指向真正的北方。方位角是恆星向量投影在水平面上的恆星向量與真北向量之間的角度[4]。
方位角簡介
在航海和航空中,方位角是指從某個基準方向(通常是北方)順時針量測到目標方向的水平角度。這個角度可以用來描述天體的位置,也可以用來指導地面上的航行。方位角的具體定義會根據使用的座標系統和測量環境有所不同,但在大多數情況下,它都是在一個360度的圓週上以順時針方向來測量的。
方位角的測量
在天體測量中,方位角是指從觀測點的地平線到天體方向的水平角度。觀測點通常是地球上的某個位置,而天體則是感興趣的目標,比如恆星或行星。方位角的測量需要一個參考平面,這個平面通常是地球表面的虛擬投影,而參考方向則是真北方向。方位角是天體向量在水平面上的投影與真北向量之間的角度。
方位角的應用
在陸地導航中,方位角常用於指示從一個位置到另一個位置的方向。方位角可以從北方基線或子午線開始量測,也可以從任何容易建立的起始方向開始量測。方位角通常以α表示,並且是從起始方向順時針量測的水平角度。
方位角的定義
方位角的定義可能因情況而異,但通常都是在一個固定的基準面上,或以一個容易建立的基準方向為起始點,順時針量測的水平角度。在360度的圓週上,方位角可以表示為從北到東、南、西的四個象限。在描述方位角時,通常是先指定參考方向,然後再指定轉向哪個方向的角度。例如,方位角可以描述為「從北順時針方向150度」,表示為「N150°E」。
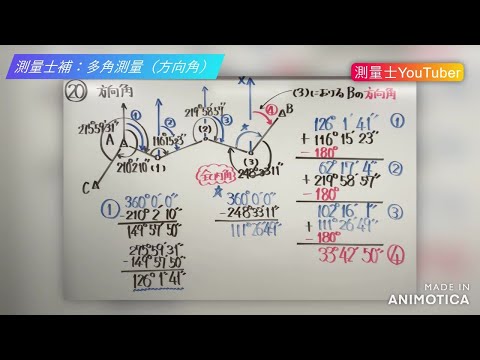
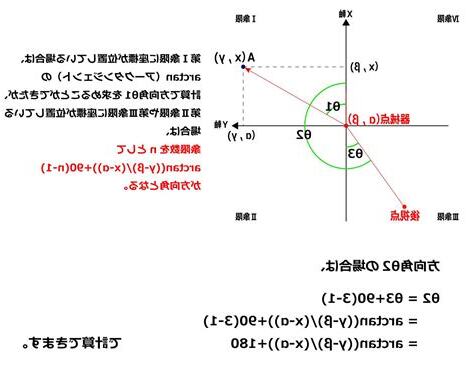
方位角的計算
當已知兩個點在平面上的座標時,可以應用空間參考系統來計算兩點之間的地圖方位角。這個過程需要將目標點的座標轉換到與基準點相同的參考系統中,然後計算兩點之間的水平角。
結語
方位角是描述方向的一種重要方式,廣泛應用於航海、航空和地理資訊系統等領域。理解和應用方位角對於精準定位和導航至關重要。
測量方位角計算是指通過特定的方法和工具來確定一個物體或位置相對於參考點的方位角度。方位角計算在各種領域中都有重要應用,例如地理測量、導航系統和天文學等。
測量方位角計算可以使用不同的技術和儀器來實現。其中一種常見的方法是使用全站儀,它通過測量兩個參考點之間的水平角度和垂直角度,來計算出物體的方位角。全站儀具有高精度和高度自動化的特點,因此在測量工作中得到廣泛應用。
另一種常見的測量方位角計算方法是使用衞星導航系統,例如全球定位系統(GPS)。通過接收多個衞星的信號,接收器可以計算出自身的位置座標和方位角。這種方法在導航系統中得到廣泛應用,例如汽車導航、航空導航和航海導航等。
測量方位角計算的準確性和精度十分重要。因此,在進行測量前,需要準確設置參考點和校準儀器。此外,還需要考慮地球的曲率和地球表面的不規則性等因素,以確保測量結果的準確性。
在實際應用中,測量方位角計算可以幫助我們確定物體的位置和方向。例如,在地理測量中,可以使用方位角計算來確定地圖上兩個地點之間的方位角度。在導航系統中,我們可以通過方位角計算來確定目的地的方向,並提供相應的路線指導。
總結來説,測量方位角計算是一種重要的技術,它在各種領域中都有廣泛應用。無論是地理測量、導航系統還是天文學,測量方位角計算都能夠幫助我們確定物體的位置和方向。通過使用先進的儀器和技術,我們能夠獲得更加精確和準確的測量結果。
測量方位角計算是一項不斷發展和進步的領域。隨著科學技術的不斷發展,我們可以期待未來測量方位角計算方法的更多創新和改進。
延伸閲讀…
工程測量中已知兩點座標,求方位角,謝謝
工程測量中座標方位角是怎麼進行推算的?