空間後方交會
定義

利用已知地面控制點及其對應像點座標,反求單幅影像外方位元素的方法,其基本思想為利用共線方程反求未知參數。
獲取外方位元素
獲得已知數據後,量測控制點的像點座標,確定參數初值(XS0,YS0,ZS0,ϕ0,ω0,κ0)。其近似值通過方向餘弦組成旋轉矩陣R來計算。接著,計算像點座標近似值,組成誤差方程式。誤差方程式的係數矩陣A中包含偏導數,通過相關推導得出的係數結果組成A矩陣。聯立方程式,得到誤差方程式。根據最小二乘原理,取單位陣為權陣,得到法方程式。解求法方程式,獲得外方位元素改正數,並與近似值求和,得到新的近似值。反覆迭代,直至外方位元素改正數小於規定限差為止。
精度評估
外方位元素的精度通過法方程式的係數矩陣的逆矩陣求得。若單位權中誤差為m0,則每個未知數的中誤差為協因數陣對角線元素的平方根乘以m0。若空間後方交會使用了n個控制點,則單位權中誤差可按特定公式計算。
解算步驟
- 獲取己知數據
- 量測控制點的像點座標
- 確定參數初值
- 計算旋轉矩陣
- 計算像點座標近似值
- 組成誤差方程式
- 組成法方程式
- 解求外方位元素
- 檢查計算是否收斂
空間前方交會
利用立體像對來解算地面點或模型點座標,可分為:
- 利用像對的相對方位元素計算模型點三維座標
- 利用像對的外方位元素計算地面點的地面座標
其演算過程涉及立體像對的內方位元素、同名像點座標、相對相對方位元素(或外方位元素)、投影係數等參數。其中,投影係數與像點的像空間座標、地面點座標有關。最終,地面點座標可透過投影係數和地面控制點座標聯立求解。
前方交會法使用時機
前方交會法是一種導航技術,用於計算飛行器與前方另一個飛行器的相對位置和速度。瞭解前方交會法的使用時機至關重要,以確保安全和高效的空中交通。
使用時機
前方交會法通常在以下情況下使用:
| 情況 | 説明 |
|---|---|
| 進近空中交通管制區 | 飛行器在進入管制區之前,使用前方交會法計算與其他飛行器的相對位置,避免碰撞。 |
| 分流 | 當空中交通壅塞時,飛行器可能會被分流到不同的航路。前方交會法有助於飛行員計算與其他飛行器在分流航路上交會的時間和位置。 |
| 追趕飛行器 | 當飛行器需要追趕另一架飛行器時,前方交會法可以幫助計算追趕速度和距離。 |
| 會合飛行器 | 當兩架飛行器需要會合時,前方交會法可以計算會合時間和位置。 |
| 協調飛行器 | 在編隊飛行或空中加油等情況下,前方交會法用於協調飛行器的位置和速度。 |
步驟
執行前方交會法涉及以下步驟:
- 蒐集數據: 獲取自己的位置、速度、航向和高度,以及目標飛行器的相同數據。
- 計算交會點: 使用三角函數或導航計算器,根據兩架飛行器的數據計算預期的交會點。
- 計算攔截時間: 計算達到交會點所需的時間,考慮兩架飛行器的速度和航向。
- 調整策略: 根據計算結果,調整飛行器的位置、速度或航向,以實現安全的交會。
優點和缺點
優點:
- 高精度: 前方交會法提供了交會點和時間的準確預測。
- 靈活性: 可以根據需要調整飛行器的路徑和速度。
- 衝突避免: 有助於提前識別並避免與其他飛行器的衝突。
缺點:
- 數據精確度: 計算結果取決於輸入數據的精確性。
- 閃避機動: 在某些情況下,可能需要進行閃避機動以防止碰撞。
- 通信需求: 涉及兩架飛行器之間的有效通信,以交換和驗證數據。
結論
前方交會法是一種有用的導航技術,在空中交通管理中廣泛使用。瞭解它的使用時機、步驟、優缺點,有助於飛行員安全高效地操作飛行器,避免空中事故。
延伸閲讀…
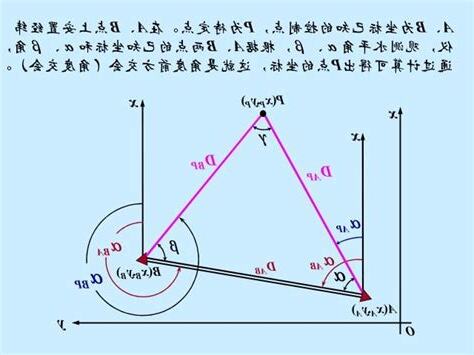
角度前方交會”是通過觀測角A和角B求出點P坐標的定位方法;“
前方交會