「前方交會法」是編寫程式代碼時必須考慮的重要因素之一。上式中提到了角 A、B 可能接近0或180度的情況,這在程式設計中並不理想。為瞭解決這個問題,可以使用下式,並引入 sign 這個變數。sign 的取值根據 A、B、P 的排列順序與方位角的增加方向判定,這樣能有效減少測量誤差。另外,為了確保精度,還需提高方位角觀測的精度並控制 P 點與 A、B 兩點的距離。
當車輛在道路上相向而行時,交通安全法規定了一套被稱為「前方交會法」的規則,以確保交通流暢和車輛和行人的安全。

前方交會法的基本原則是,在正常情況下,車輛應該保持在道路右側行駛,並保持適當的距離,以便在兩輛車交會時有足夠的空間通行。這一原則適用於單行道和雙向車道,以及無助行者的情況。
根據前方交會法,當兩輛車輛相向而行時,彼此應該盡量保持靠右行駛,並適當減速以保持安全距離。此外,司機應該避免超車或行駛過於接近對向車道的中線。
前方交會法的目的是促進交通流暢和安全。遵守這一法規不僅可以減少交通堵塞,還可以減少交通事故的發生。因此,在市區和城市道路上,司機應該牢記前方交會法的要求,並始終保持警覺。
在進行超車時,前方交會法還規定了一些具體的規則。在超車前,司機應該確保前面沒有來車,並使用瞭望鏡確認安全。超車時,司機應在對方車輛前方具有足夠的空間,並且在完成超車後迅速回到原來的車道上。
違反前方交會法可能會導致交通違規罰單或事故的發生。因此,作為一名司機,我們應該始終遵守這些法規,確保自己和他人的安全。
希望這篇文章能為你帶來幫助!如果有其他疑問,請隨時提出。謝謝!
前方交會法及其在捷運基坑監測中的應用
相機標定的原理與方法
在光學成像測量領域,相機標定是極為重要的一環。傳統相機標定法需要使用已知的3D坐標點與其像點間的對應關係,而基於主動視覺的標定方法則通過控制攝像機的精確運動來計算內外參數。相比之下,自標定方法利用不同角度獲得的同名像點間的共麵條件方程,實現了無需精密標定板或高精度攝像機運動平台的標定。這些方法在視頻測量、機器視覺等應用中具有重要價值。
前方交會法在捷運基坑監測中的應用
在捷運基坑監測中,前方交會法常用於工作基點的穩定性檢查。該方法至少需要在兩個觀測墩上設站測量,觀測量較大,且對圖形條件要求高,限制了大範圍使用。然而,由於其視角開闊,能夠觀測到基坑內大部分點位,因此在某些特定場合下應用較為廣泛。
結語
相機標定是實現高精度光學成像測量的基礎,前方交會法則是基坑監測中常用的技術之一。隨著科技的進步,自標定方法等新技術將為這些領域帶來更多便利和精度。
延伸閲讀…
前方交會_百度百科
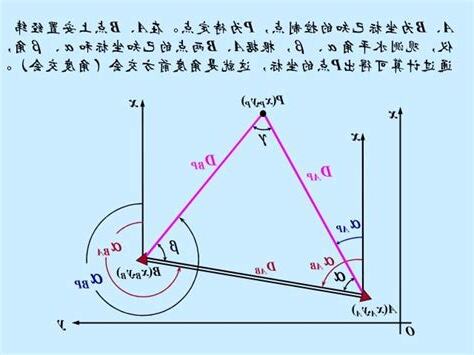
角度前方交會”是通過觀測角A和角B求出點P坐標的定位方法;“
“`